1、Capability系统设计实现概述
一个capability其实就是一个指针,但又是指针的一个超集,一个capability往往含有两个成员,一个是指向某块内存的地址addr,另一个是权限rights,权限用以说明某进程可以对 通过该capability寻址得到的内存 进行哪种操作(如只读、读写、只写)。
因此,可以把capability理解为一种带有权限的指针 ,我在后文中提到“capability”时,既有可能是指保存该“capability”本身的那块内存,也有可能是指该“capability”所指向的那块内存。大家需要根据语境自行判断。举一个例子,比如后文提到的“l1_CNode用来存储l2_CNode”,这句话中的“l1_CNode”就是指类型为l1_CNode类型的capability所指向的某一段内存,而这句话中的“l2_CNode”是指保存l2_CNode类型的capability本身的那块内存,即该内存中的数据为地址+权限。
Barrelfish内核为每一个dispatcher维护其CSpace(某进程拥有的所有capability构成该进程的CSpace),沿用seL4中CNode及两级寻址的方式设计,具体方式为在dcb(dispatcher control block,进程控制块)中保存Root_CNode的地址。
Root_CNode是一块固定大小的内存,这块内存按照cte(capability table entry)的大小分为很多slots块,每一个slot块中可保存一个cte,一个cte就是一个capabiltiy,会指向另一块保存有数据的内存。
Root_CNode又称为l1_CNode,Root_CNode中保存的cte必须是l2_CNode类型的capability,每个l2_CNode也指向一块固定大小的内存,这块内存其中也有很多slots,每个slots中可保存一个cte,l2_CNode中保存的cte就是系统中真实使用的各种其他类型的capability,如dispatcher类型的、ram类型的等等。
l1_CNode(root_CNode)和l2_CNode都是用来存储capability的capability。只不过l1_CNode中保存的是l2_CNode类型的capability,而l2_CNode中保存的是其他非CNode类型的capability。
查询一个dispatcher的任意一个capability,都需要经过其root_CNode,首先定位到保存该cap的l2_CNode,最后再定位到该cap。有点类似于两级页表寻址,Root_CNode是页目录,l2_CNode是页表,l2_CNode中的某个slot是页表项。每个进程的dcb中都保存了root_CNode的地址。通过该地址可以索引该进程的整个CSpace。
l1_CNode和l2_CNode也是capability所有不同类型中的两种类型,与ram | dispatcher | … 一样也是capability,所有capbility都有如下性质:即包含指向某一段内存的信息(虚地址addr、虚拟内存大小size)以及相关权限rights。
内核中定义实现了capability的相关数据结构,定义实现如下:
文件路径:kernel/include/capabilities.h
/**
* \brief A CTE (Capability Table Entry).
*
* A CTE is an entry in a CNode, which in turn is an entry in CSpace, the
* capability space. CSpace is a guarded tree structure. Refer to the seL4
* reference manual for further information about how CSpace is implemented.
*/
struct cte {
struct capability cap; ///< The capability
char padding0[ROUND_UP(sizeof(struct capability), 8)- sizeof(struct capability)];
struct mdbnode mdbnode; ///< MDB "root" node for the cap
char padding1[ROUND_UP(sizeof(struct mdbnode), 8) - sizeof(struct mdbnode)];
struct delete_list delete_node; ///< State for in-progress delete cascades
/// Padding to fill the struct out to the size required by OBJBITS_CTE
char padding[(1UL << OBJBITS_CTE)
- sizeof(struct delete_list)
- ROUND_UP(sizeof(struct capability), 8)
- ROUND_UP(sizeof(struct mdbnode), 8)];
};
由于每个slots是固定大小,所以定义了一些padding用来对齐大小。我们首先关注第一个成员cap,后两个成员mdbnode和delete_node暂时不管,后面会详细说明。
注意到其中的第一个成员cap的类型为capability类型的结构体,该结构体定义如下:
文件路径:build/armv8/include/barrelfish_kpi/capbits.h
(这个文件是由Hamlet————一种描述capability类型系统的DSL自动生成的)
在Hamlet中定义cap的类型和接口,然后自动生成部分capability相关的代码。对于Hamlet感兴趣的话,因为ETH自己暂时没有Hamlet相关的文档,可以看下System Research at Harvard的这个仓库:
https://github.com/Harvard-PRINCESS/Guppy/wiki/Hamlet-Tutorial
struct capability {union capability_u u;
enum objtype type;
CapRights rights;};
可以看到一个cap包含三个成员变量,分别是
- 一个用来保存具体类型的cap的联合体
- 一个枚举类型的类型变量
- 以及该cap所对应的权限
其中第一个联合体成员定义如下:
union capability_u {struct Null null;
struct PhysAddr physaddr;
struct RAM ram;
struct L1CNode l1cnode;
struct L2CNode l2cnode;
struct FCNode fcnode;
struct Dispatcher dispatcher;
struct EndPoint endpoint;
struct Frame frame;
struct Frame_Mapping frame_mapping;
struct DevFrame devframe;
struct DevFrame_Mapping devframe_mapping;
struct Kernel kernel;
struct VNode_x86_64_pml4 vnode_x86_64_pml4;
struct VNode_x86_64_pml4_Mapping vnode_x86_64_pml4_mapping;
struct VNode_x86_64_pdpt vnode_x86_64_pdpt;
struct VNode_x86_64_pdpt_Mapping vnode_x86_64_pdpt_mapping;
struct VNode_x86_64_pdir vnode_x86_64_pdir;
struct VNode_x86_64_pdir_Mapping vnode_x86_64_pdir_mapping;
struct VNode_x86_64_ptable vnode_x86_64_ptable;
struct VNode_x86_64_ptable_Mapping vnode_x86_64_ptable_mapping;
struct VNode_x86_32_pdpt vnode_x86_32_pdpt;
struct VNode_x86_32_pdpt_Mapping vnode_x86_32_pdpt_mapping;
struct VNode_x86_32_pdir vnode_x86_32_pdir;
struct VNode_x86_32_pdir_Mapping vnode_x86_32_pdir_mapping;
struct VNode_x86_32_ptable vnode_x86_32_ptable;
struct VNode_x86_32_ptable_Mapping vnode_x86_32_ptable_mapping;
struct VNode_ARM_l1 vnode_arm_l1;
struct VNode_ARM_l1_Mapping vnode_arm_l1_mapping;
struct VNode_ARM_l2 vnode_arm_l2;
struct VNode_ARM_l2_Mapping vnode_arm_l2_mapping;
struct VNode_AARCH64_l0 vnode_aarch64_l0;
struct VNode_AARCH64_l0_Mapping vnode_aarch64_l0_mapping;
struct VNode_AARCH64_l1 vnode_aarch64_l1;
struct VNode_AARCH64_l1_Mapping vnode_aarch64_l1_mapping;
struct VNode_AARCH64_l2 vnode_aarch64_l2;
struct VNode_AARCH64_l2_Mapping vnode_aarch64_l2_mapping;
struct VNode_AARCH64_l3 vnode_aarch64_l3;
struct VNode_AARCH64_l3_Mapping vnode_aarch64_l3_mapping;
struct IRQTable irqtable;
struct IRQDest irqdest;
struct IRQSrc irqsrc;
struct IO io;
struct Notify_IPI notify_ipi;
struct ID id;
struct PerfMon perfmon;
struct KernelControlBlock kernelcontrolblock;
struct IPI ipi;
struct ProcessManager processmanager;
struct Domain domain;};
可以看到这个联合体包含了Barrelfish系统中可能出现的所有类型的capability的结构体定义。由于不同体系结构的CPU的内核所需要的capability类型是不同的(比如可以看到上面很多名字中带x86、ARM、aarch64的cap类型),所以Barrelfish的开发者选择用Hamlet DSL来自动生成这部分代码。
下面对capability的类型系统作说明。
对capability类型系统的解释:
不同类型的capability代表不同类型的系统资源,比如:
- dispatcher类型的cap就指向内核中一个dispatcher的dcb(dispatcher control block)
- ram类型的cap就指向一段虚拟内存。。
- PhysAddr类型的cap就指向一段未被映射的物理内存
- CNnode类型的cap就指向一段专门用来保存cap的虚拟内存
- …
这里附上上述类型的cap的结构体定义:
struct Dispatcher {struct dcb* dcb;};
struct RAM {genpaddr_t base; // genpaddr 指 general physical address
pasid_t pasid;
gensize_t bytes;};
struct PhysAddr {genpaddr_t base;
pasid_t pasid;
gensize_t bytes;};
struct L1CNode {lpaddr_t cnode; // lpaddr 指 local physical address
CapRights rightsmask;
gensize_t allocated_bytes;};
struct L2CNode {lpaddr_t cnode;
CapRights rightsmask;};
capability类型与类型之间是可以相互转换的,但是需要遵循一定的规则,barrelfish规定了一棵类似于树形的结构,来表示合法的类型转换路径,见下图:
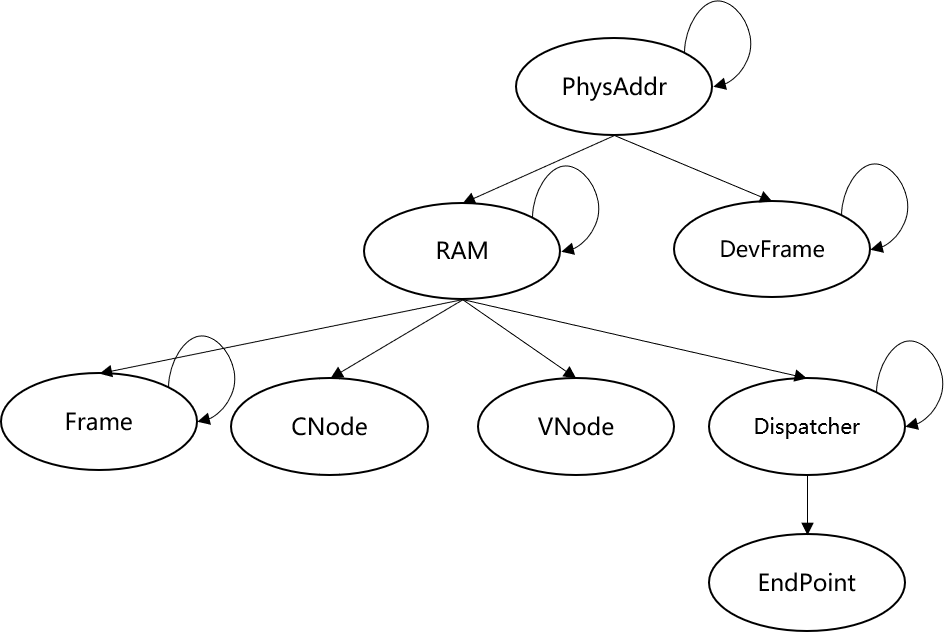
类型转换举例:
比如最基础的类型是PhysAddr,所有其他类型都从该类型转换而来,因为所有的资源说白了都是一块内存,只不过里面保存的数据的类型不一样。
PhysAddr可以转换为Ram,可能需要经过一定的虚实映射操作,barrelfish在进行虚实映射时也用到了cap来索引页目录及页表等资源,比如上述的VNode_x86_64_pml4 vnode_x86_64_pml4以及所有其他和这个长得很像的东西,都是指向页表的cap,对应每种页表cap还有映射cap,这里暂不深究,这个属于barrelfish的虚存实现机制了,感兴趣可以看《http://www.barrelfish.org/publications/gerber-master-vm.pdf》 这篇文章。
PhysAddr转换为Ram类型后,Ram类型的cap又可以转换为dispatcher、l1_CNode、l2_CNode…..等各种类型的cap。当然,Ram类型的cap也可以转换为自身的ram类型,即上图中每个节点指向自身的路径,当我们需要将一块size较大的ram分割为两块size较小的ram时。
类型转换的术语叫做 retype.后续会再对这个做解释。
就像面向对象的思想一样,对于每种不同类型的cap,系统提供了不同的对其操作的接口,调用这些接口的术语叫做invoke。
可以在 include/barrelfish_kpi/capabilities.h 中找到相关定义,比如:
对于dispatcher类型的cap(指向进程控制表),提供了以下类型的command:
/** * Specific commands for dispatcher capabilities. */ enum dispatcher_cmd { DispatcherCmd_Setup, ///< Set dispatcher parameters DispatcherCmd_Properties, ///< Set dispatcher properties DispatcherCmd_PerfMon, ///< Performance monitoring DispatcherCmd_SetupGuest, ///< Set up the DCB of a guest domain DispatcherCmd_DumpPTables, ///< Dump hw page tables of dispatcher 比如打印维护进程虚存空间的页表 DispatcherCmd_DumpCapabilities, ///< Dump capabilities of dispatcher· 又比如打印该进程所拥有的所有cap(打印CSpace) DispatcherCmd_Vmread, ///< Execute vmread on the current and active VMCS DispatcherCmd_Vmwrite, ///< Execute vmwrite on the current and active VMCS DispatcherCmd_Vmptrld, ///< Make VMCS clear and inactive DispatcherCmd_Vmclear, ///< Make VMCS current and active };对于VNode类型的cap(指向一段虚存),提供了以下类型的command:
enum vnode_cmd { VNodeCmd_Map, VNodeCmd_Unmap, VNodeCmd_Identify, ///< Return the physical address of the VNode VNodeCmd_ModifyFlags, };对于CNode类型的cap(指向一段用来保存capability的内存,即指向某一个cap),提供了以下类型的command:
/** * CNode capability commands. */ enum cnode_cmd { CNodeCmd_Copy, ///< Copy capability CNodeCmd_Mint, ///< Mint capability CNodeCmd_Retype, ///< Retype capability ————>这就是之前说到的类型转换操作 CNodeCmd_Delete, ///< Delete capability CNodeCmd_Revoke, ///< Revoke capability CNodeCmd_Create, ///< Create capability CNodeCmd_GetState, ///< Get distcap state for capability CNodeCmd_GetSize, ///< Get Size of CNode, only applicable for L1 Cnode CNodeCmd_Resize, ///< Resize CNode, only applicable for L1 Cnode };
上述提供的对CNode的操作,其中Resize、GetSize都是针对CNode本身进行的操作,而Copy、Mint、Retype、Delete等都是针对这个CNode中的作为叶子节点的非CNode类型capability进行的操作。 可见对某一个cap进行某种操作时,需要对该cap所位于的CNode调用该操作。
所有对于cap的操作,都需要通过该cap所在的CNode调用。
比如我想将一个ram类型的cap转型为Dispatcher类型,用来存储dcb,那么就需要对该ram类型的capability所在的root_CNode调用invoke操作,同时将invoke时的cmd参数设置为CNodeCmd_Retype,同时设置好其他参数,比如转型前的类型和转型后的类型,转型前的cap的地址以及转型后的cap所存放地址等等。等。
上述这些对cap进行的操作会使cap之间存在副本、后代这样的关系,我们通过之前的介绍已经知道了,一个进程的CSpace是一个两级树形结构,它的根是Root_CNode,root下面有很多l2_CNode,每个l2_CNode下面是最终的叶子节点capabilty,但是上述的copy、retype等操作以及barrelfish所支持的在进程间发送/接受cap的功能,会使同一个CSpace内,乃至不同CSpace内部的capability产生联系,这种联系说白了就是“副本”or“后代”or“祖先”这样的关系。
如果一个capA经过retype操作转型为capB,那么capA就是capB的“祖先”,capB就是capA的“后代”。“副本”关系则由copy操作产生。
在系统的运行中常常需要查询这些关系,从而保证上述针对cap的操作能够正确地完成,(举个例子,比如一个ram类型的capability(我们称其为capA)已经经过一次retype操作,得到了一个dispatcher类型的capB,那么之后就不能再对capA进行retype操作,将其retype成别的类型的cap,(因为capA所指向的那段内存,也就是capB所指向的内存,我们已经用来存dcb了,不能再存别的),所以我们在对一个cap进行类型转换即retype操作前,往往要查询其是否已经有后代了)。为此,Barrelfish使用了一个叫做mdb的数据库(mapping database)来存储capability之间这样的关系,以便系统运行时动态地查询、更新cap之间的关系。
后面会详细介绍mdb。
mdb简介
Barrelfish的mdb实现为AA树,是红黑树的一个变种。AA树和红黑树都是搜索树,即树中的节点是存在一定的偏序关系的。
Barrelfish将capability按照cap类型、内存基地址、内存大小等因素排序,从而产生cap之间的偏序关系。比如 父类型 > 子类型 基址低 > 基址高 size大 > size小。
互为副本的两个cap, 其类型、基址、大小等相同,因此在树中的位置也相邻。而互为祖先后代的两个cap,在树中的位置一定是祖先在前,后代在后,满足上述的自定义偏序。
上文中cte的结构体定义中,有一个成员为
struct mdbnode mdbnode; ///< MDB "root" node for the cap
这就是用来表示该cte所代表的capabiltiy,在mdb中的表示。
mdbnode结构体的定义如下:
文件路径:include/mdb/types.h
/**
* \brief A mapping database node.
*/
struct mdbnode {
struct cte *left, *right;
genpaddr_t end;
mdb_root_t end_root;
mdb_level_t level;
bool remote_copies:1, remote_ancs:1, remote_descs:1;
bool locked:1, in_delete:1;
coreid_t owner;
};
可以看到这个树节点的定义除了包含指向左右两个子节点的cap的指针,还包含一些其他数据,这些数据我们后面介绍。
mdb的代码实现:
include/mdb/mdb.h
include/mdb/mdb_tree.h
include/mdb/types.h
lib/mdb/mdb.c
lib/mdb/mdb_tree.c
多核系统capability模型设计
上述capability模型主要解决了单内核下的情况,这里主要分析一下在Barrelfish这样的多内核操作系统中,上述capability系统存在的问题以及Barrelfish是如何解决这些问题的。
2、capability相关的代码模块分析
1、模块分析
x86下代码模块(armv7、armv8类似)
User-level
lib/barrelfish/capabilities.c - user-level capability management stuff
usr/monitor/capops, usr/monitor/capops/include, usr/tests/capops - C code for user-level capabilities operations
Kernel-level
capabilities/caps.hl - capabilities definition file
tools/create_static_cap_dot.py - generate a dependency/hierarchy graph from a Hamlet file
kernel/cap_delete.c - Kernel capability delete code
kernel/include/cap_predicates.h - capability pre-declares (?)
include/barrelfish_kpi/capabilities.h - required capabilities definitions
build/x86_64/capabilities/*.c - Hamlet capabilities output C
kernel目录下
kernel/include/capabilities.h
cte等数据结构的定义、内核中所需要用到的所有capability相关的函数的声明
kernel/include/cap_predicates.h
一些返回值为布尔类型的对cte或capability进行判断的函数
kernel/capabilities.c
内核中所有需要用到的capability相关函数的实现,包括cap创建、删除、索引等
两级树状CSpace的实现,各种cap操作的实现以及对cap系统的tracing支持
kernel/cap_delete.c
由于多内核的分布式特性,导致对capability的删除操作比较复杂,所以单独分离出来作为一个文件。
lib目录下主要是lib/barrelfish和lib/mdb
lib/mdb/mdb.c
lib/mdb/mdb_tree.c
lib/barrelfish/capabilities.c
usr目录下主要是monitor中
usr/monitor/capops/ 整个目录实现monitor的cap操作
usr/monitor/invocations.c
if目录下是各种消息接口定义,是用一种叫做flounder的DSL语言实现的,flounder实现的消息接口通过haskell实现的编译器可以生成相应的c代码,和capability有关的主要是monitor部分的消息接口:
if/monitor.if
/* for UMP/BMP cap tx */
message cap_send_request(
uintptr mon_id,
cap cap,
capid capid);
message cap_move_request(
uintptr mon_id,
give_away_cap cap,
capid capid);
message cap_receive_request(
uintptr conn_id,
errval err,
give_away_cap cap,
capid capid);
if/monitor_blocking.if
/* Remote cap operation messages */
rpc remote_cap_retype(in cap src_root, in cap dest_root, in uint32 src,
in uint64 offset, in uint64 objtype, in uint64 objsize,
in uint64 count, in uint32 to, in uint32 slot,
in int dcn_level, out errval err);
rpc remote_cap_delete(in cap croot, in uint32 src, in uint8 level,
out errval err);
rpc remote_cap_revoke(in cap croot, in uint32 src, in uint8 level,
out errval err);
rpc get_phyaddr_cap(out cap pyaddr, out errval err);
rpc get_io_cap(out cap io, out errval err);
// Get a capability that is targeted at the local apic.
rpc get_irq_dest_cap(out cap io, out errval err);
// debug cap identify mechanism
rpc cap_identify(in cap cap, out errval err, out caprep caprep);
// XXX: Hack to set a cap remote until we have x-core cap management
rpc cap_set_remote(in cap cap, in bool remote, out errval err);
/* Allocate an IRQ on the arm plattform */
rpc arm_irq_handle(in cap ep, in uint32 irq, out errval err);
/* Retrieve local arch-specific core ID (e.g. APIC ID on x86)*/
rpc get_arch_core_id(out uintptr id);
/* get cap that can be used to send IPIs */
rpc get_ipi_cap(out cap cap);
rpc forward_kcb_request(in coreid destination, in cap kcb, out errval err);